NPS CRUSER Meeting Recap: “Modeling and Optimization of Adversarial Swarm Engagements”

The Naval Postgraduate School (NPS) provides defense-focused graduate education, including classified studies and interdisciplinary research, to advance the operational effectiveness, technological leadership and warfighting advantage of the U.S. Naval service. The CRUSER division of the Naval Postgraduate School is a highly respected academic institution noted for its work in unmanned autonomous systems and for its contributions in other leading technology and defense arenas. CRUSER holds monthly Zoom conferences open to both NAVY personnel involved in unmanned systems and related technologies, and to the many CRUSER members teaching at our colleges and universities.
NREF was honored to participate as an observer in the September 13 CRUSER meeting. The topic of swarm behavior is a hot robotics topic that is gaining heightened attention owing to the rise of weaponized drone swarms.
The event was hosted by Brian Bingham, Professor, Mechanical and Aerospace Engineering, NPS Graduate School of Engineering and Applied Sciences. Speakers included Abe Clark, Assistant Professor of Physics; Isaac Kaminer, Professor of Mechanical and Aerospace Engineering; and Major Michael Wish, USMC Naval Postgraduate School, Monterey, CA, and was presented in collaboration with Qi Gong, UCSC; Claire Walton, UTSA; and Theo Tsatsanifos, NPS, Hellenic Navy.
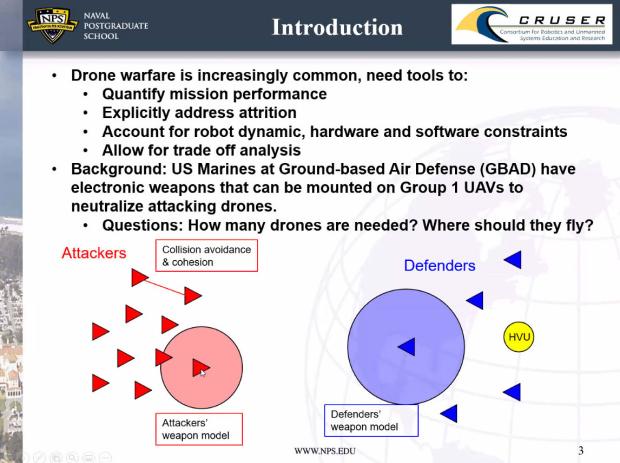
The webinar provided an introduction to the issues faced by military planners, and the discussion laid out the path for next steps. Tools are needed to quantify mission performance, address attrition, and account for robot dynamics, hardware and software constraints, and to conduct trade-off analysis. US Marines have electronic weapons that can be mounted on Group 1 UAVs to neutralize attacking drones, but how many drones are needed and where should they fly?
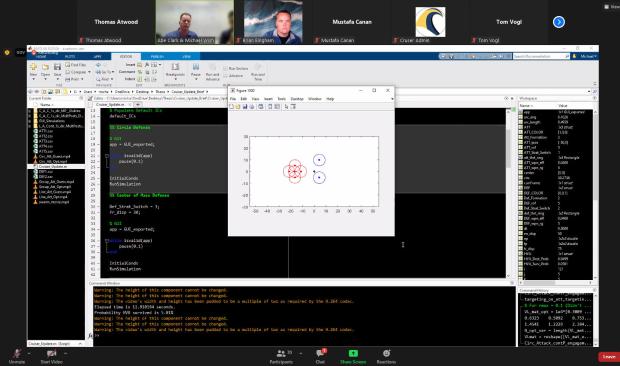
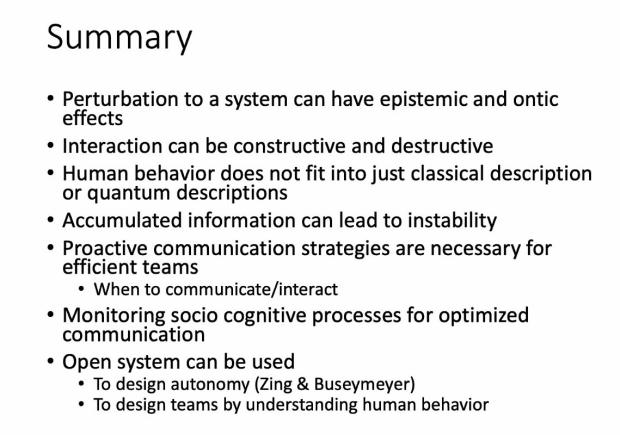
The latter portion of the discussion addressed reducing planning strategies to mathematical equations to describe and forecast the probability of success given attacker and defender dynamics, which was an interesting exercise. Software that dynamically simulates unfolding military scenarios was also introduced. The MATLAB GUI Interface was shown in a “simulation sandbox” and characterized as an early, simple depiction. The conclusion noted these were first steps in demonstrating the “crucial role of coupling dynamics and attrition in modeling adversarial autonomy,” and indicated positive movement toward planning tools that will use the methods discussed.
For further information, you can reach Brian Bingham at bbingham[at]nps[dot]edu.