Toyota Research Shares Soft Robotics Gripper Design

The Toyota Research Institute (TRI) has announced it is sharing the design source files and full build instructions for its innovative domestic soft-gripper robot hands, with the goal of accelerating the field of soft robotics. Alex Alspach, TRI’s Robotics Tactile Team Manager and lead developer of the gripper noted, “By sharing the blueprints for this gripper with the world, we hope that our friends and colleagues can test our technology, improve upon it, and take us closer to building robotic assistants that help to provide independence, dignity, and joy to those with disabilities or age-related challenges.”
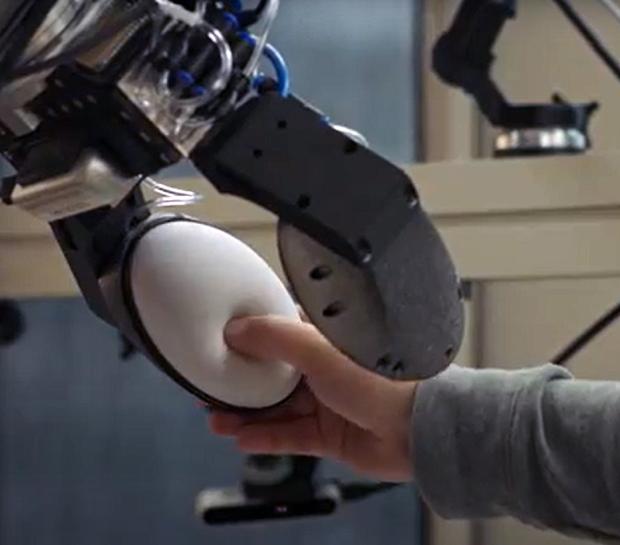
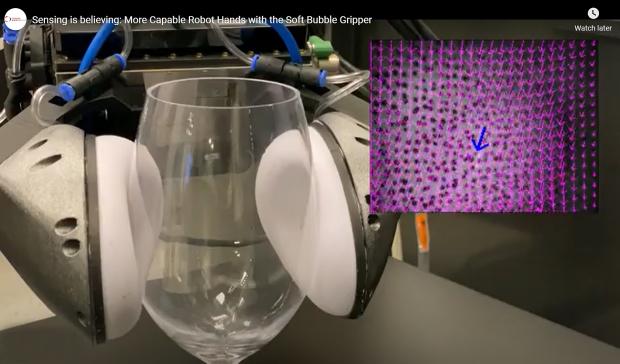
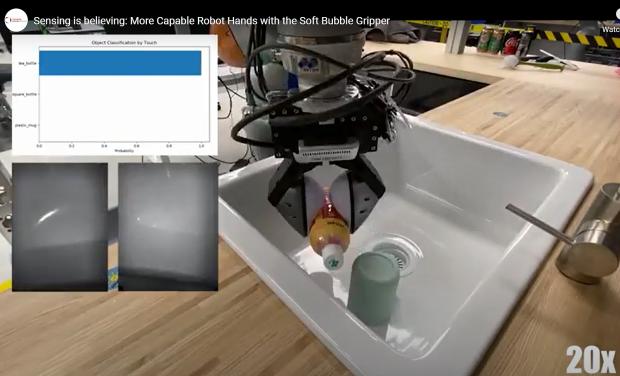
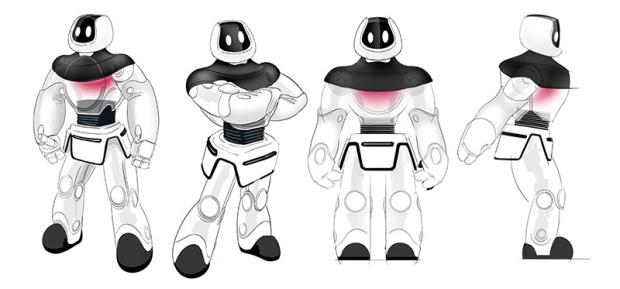
Most robots today are hard to the touch, and use rigid grippers, but TRI’s air-filled, elastic bubble design allows robots greater flexibility to better hold objects. When combined with cameras on the inside, the shape and force-sensing gripper lets robots respond to and control an object when it slips or moves. Any research institution or aspiring roboticist can visit Punyo.tech to build their own Punyo Soft Bubble Gripper. For more details on the domestic humanoid concept that will use the grippers as well as video showing the grippers in use, please visit Robotics-world.com.