Ornithopter with Morphing-Coupled Wingbeat Pattern
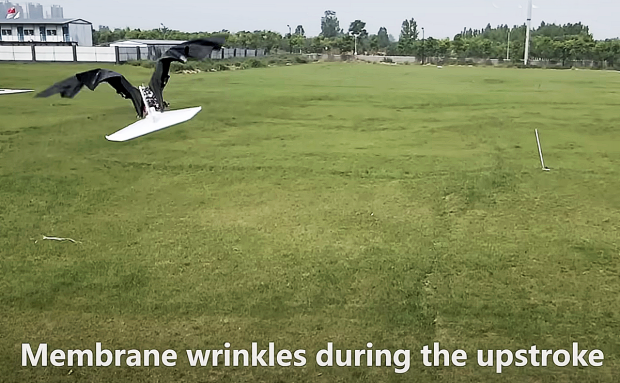


We’ve all seen toy and hobby-grade RC ornithopters efficiently flying under the control of an operator using an RC transmitter. And, of course, much larger, more sophisticated ornithopters that look like raptors have been developed to patrol airports to keep birds off of runways. As reported by the IEEE, RoboFalcon uses an approach to flapping wings that is new—the wings collapse as they swing upward. Watch a video, here. You can read: “A Novel Actuation Strategy for an Agile Bioinspired FWAV Performing a Morphing-Coupled Wingbeat Pattern,” in the IEEE Transactions on Robotics (Subscription required).
Abstract:
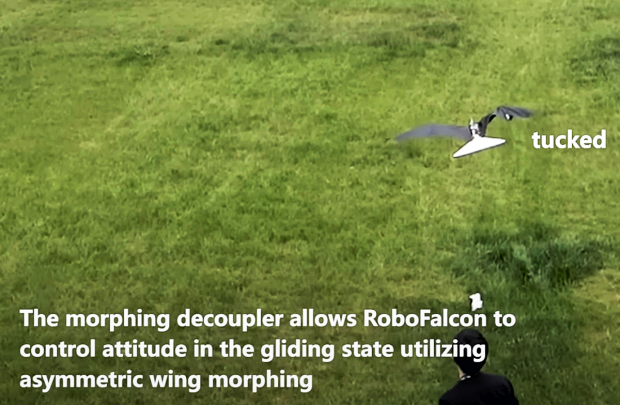
Flying vertebrates exhibit sophisticated wingbeat kinematics. Their specialized forelimbs allow for the wing morphing motion to couple with the flapping motion during their level flight. Previous flyable bionic platforms have successfully applied bioinspired wing morphing but cannot yet be propelled by the morphing-coupled wingbeat pattern. Spurred by this, we develop a bioinspired flapping-wing aerial vehicle entitled RoboFalcon, which is equipped with a novel mechanism to drive the bat-style morphing wings, performs a morphing-coupled wingbeat pattern, and overall manages an appealing flight. The novel mechanism of RoboFalcon allows coupling the morphing and flapping during level flight and decoupling these when maneuvering is required, producing a bilateral asymmetric downstroke affording high rolling agility. The bat-style morphing wing is designed with a tilted mounting angle around the radius at the wrist joint to mimic the wrist supination and pronation effect of flying vertebrates’ forelimbs. Wind tunnel tests indicate that the rolling moment of the asymmetric downstroke is correlated with the flapping frequency, and the wrist mounting angle can be used for tuning the angle of attack, lift-thrust configuration, and power consumption of the equilibrium flight state. The agility of RoboFalcon is assessed through several tethered rolling maneuvers and outdoor free flight tests, and we present a concise analysis of the vehicle's lateral dynamics model based on system identification. We believe that this article yields a well-performing bionic platform and provides a new actuation strategy for the morphing-coupled flapping flight.